实验要求
找到目标颜色所在区域
算法实现
- 色度空间转换
1.1 读取图像并滤波
1.2 根据公式将图像从rgb转换到hsv色度空间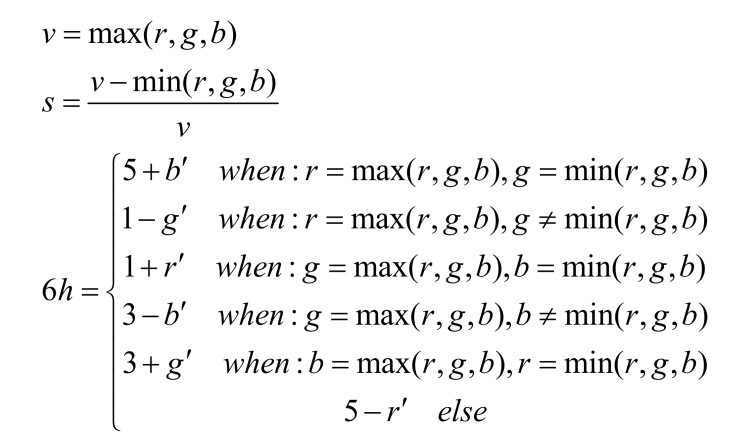
- 颜色分割
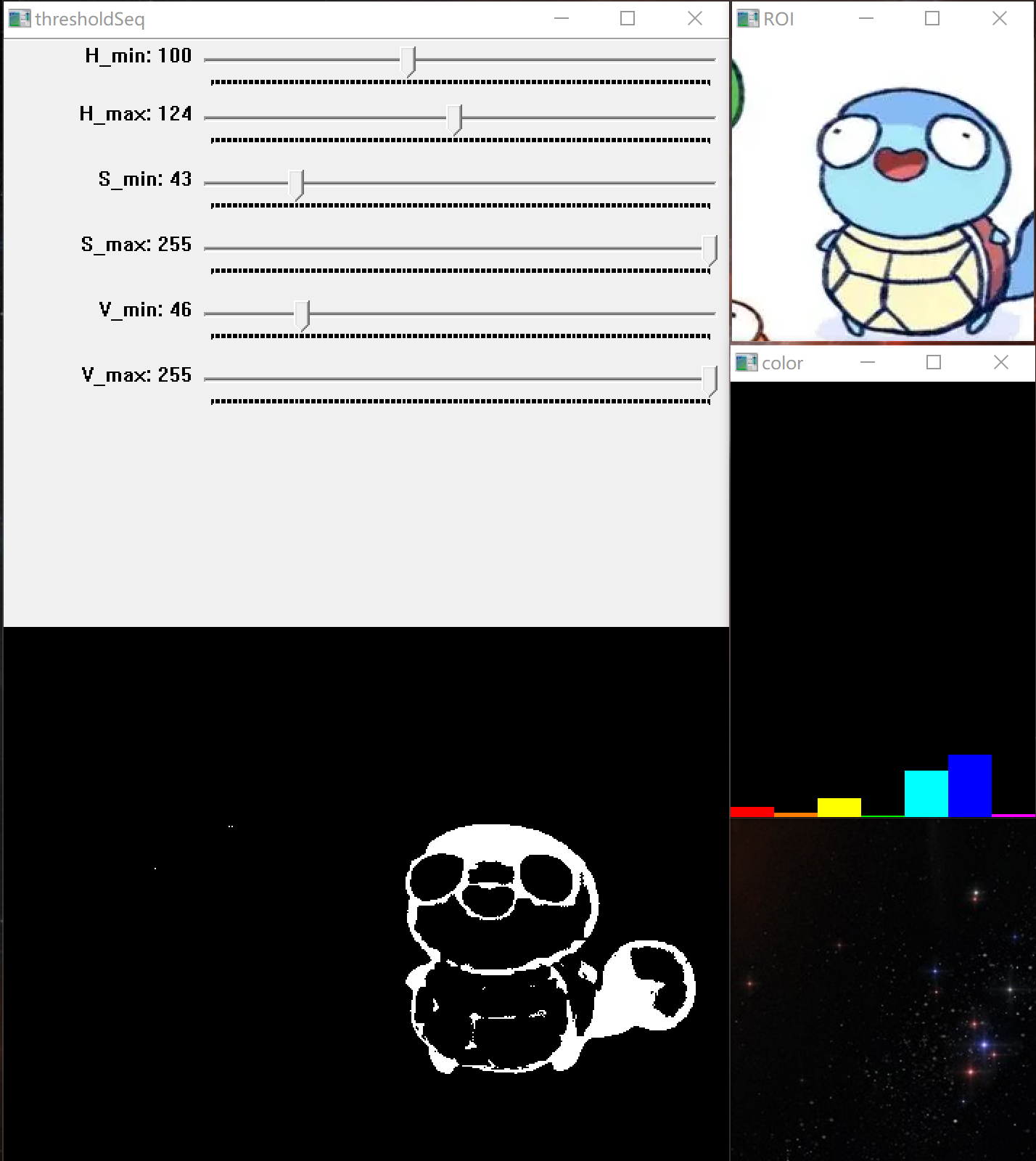
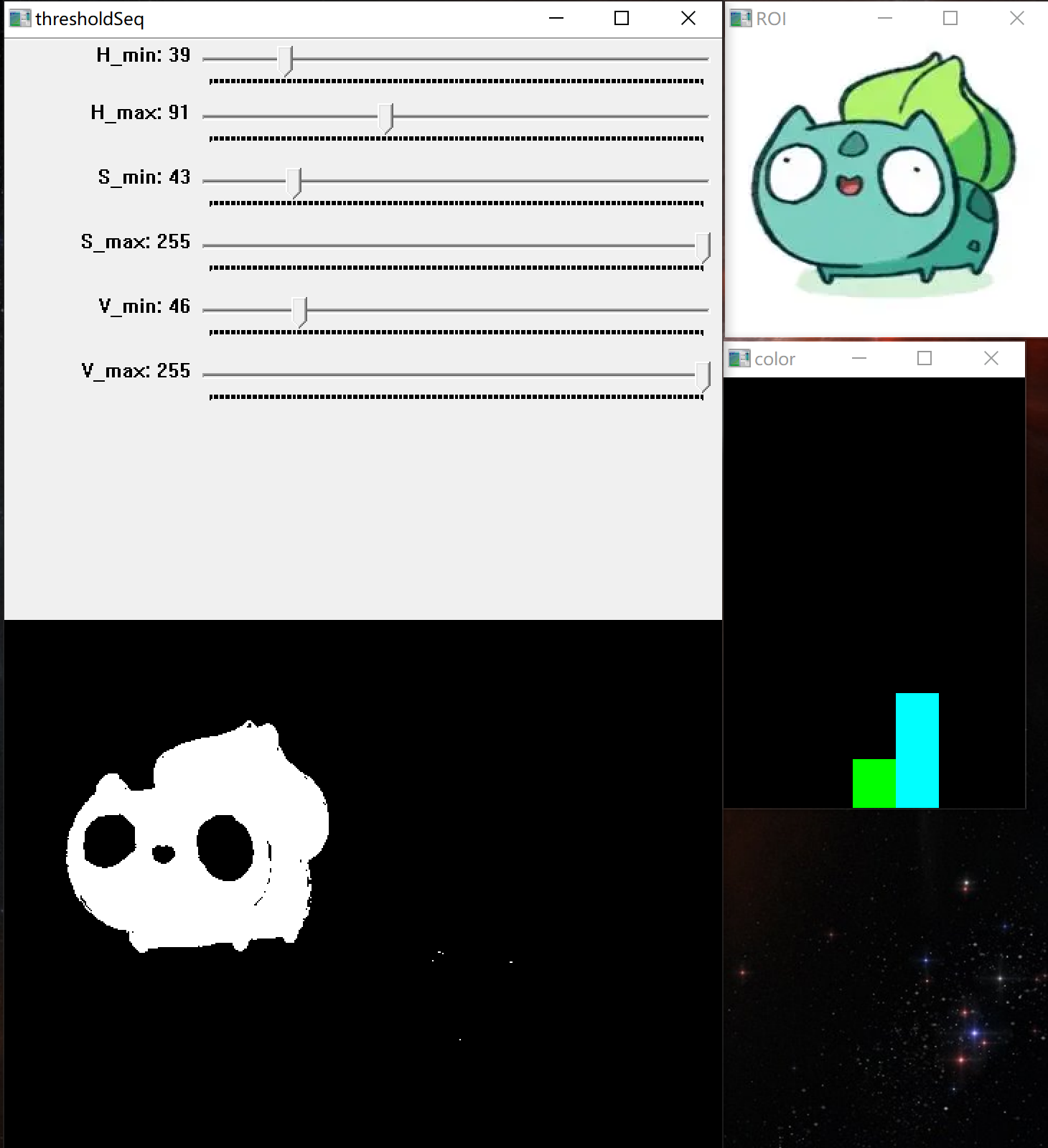
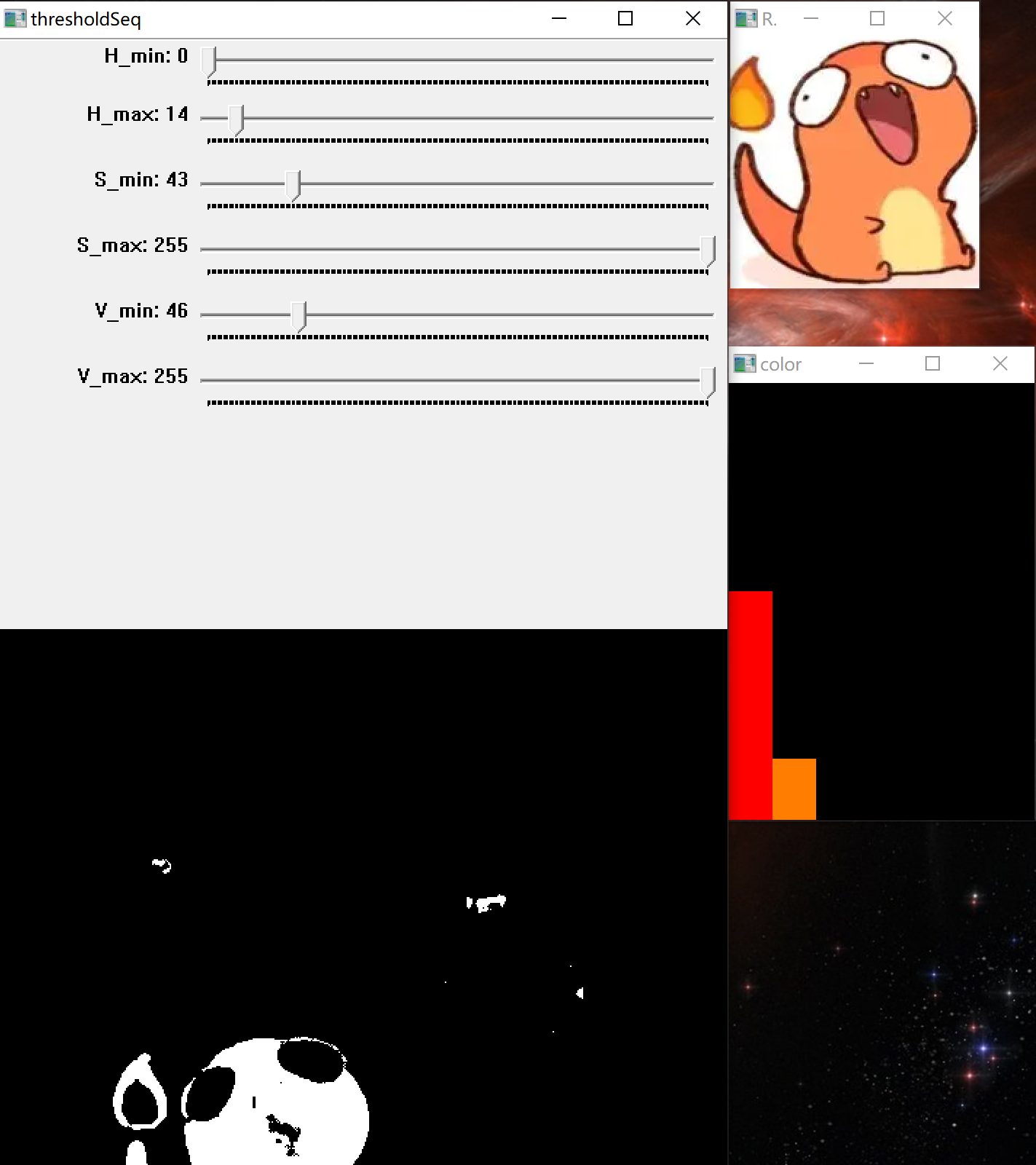
2.1 利用 createTrackbar()函数建立滑动条,对颜色空间转换后的各通道进行阈值分割
2.2 根据阈值分割的结果,判断各种颜色的对应阈值
2.3 针对不同颜色,分别对图像进行阈值分割
2.4 对阈值分割结果进行数学统计,判断图像的颜色并输出分类结果
- 目标颜色检测
3.1 对图像进行预处理,消除噪声并获取二值化图
3.2 对二值图进行轮廓检测;
3.3 根据任务目标选择合适的多边形描述轮廓;
3.4 获取多边形区域后,从原图中截取该区域图像;
3.5 对多边形区域的图像进行颜色分割,对分割结果进行统计,判断图像的颜色并输出分类结果
代码实现
1 |
|
运行结果