介绍
本项目为基于OpenCV的火花塞间隙尺寸测量,主要是运用模板匹配技术定位火花塞间隙尺寸,然后寻找火花塞间隙并测量其尺寸。
算法说明
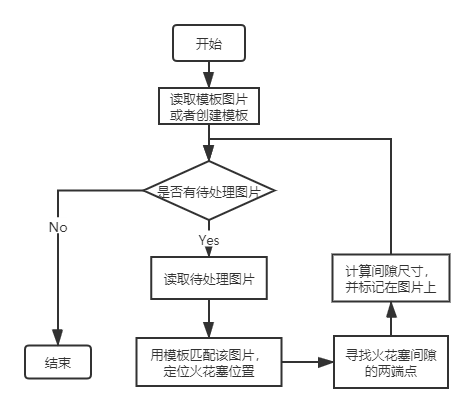
程序主要分成四个部分:
预处理:
在此部分中,将完成模板的创建和待处理图片的路径读取。程序将从文件夹中读取model.png图片作为模板。如果文件夹中没有该图片,则将从第一张待处理图片中截取所需区域作为模板。
匹配:
此函数主要调用OpenCV库中的matchTemplate函数以及相关函数寻找各种角度的图片中与模板的最佳匹配点,并且根据该点找寻区域的中心位置。模板匹配算法根据需要决定,本项目使用平均方差。
旋转图像
为了匹配旋转的图像,所以在匹配时要将图像进行旋转。
旋转使用的是仿射变换,仿射矩阵可用getRotationMatrix2D()得到M1。
由于在旋转图像后,图像的大小也会改变,所以不能直接使用M1进行变换,而是要用getAffineTransform()函数再获得一个大小变换矩阵M2
最后将M1的旋转部分和M2的大小变换部分相结合变成一个新的变换矩阵M,使用warpAffine()函数就能完成图像的仿射变换。
由于代码需要,还需要写坐标变换的函数,公式如下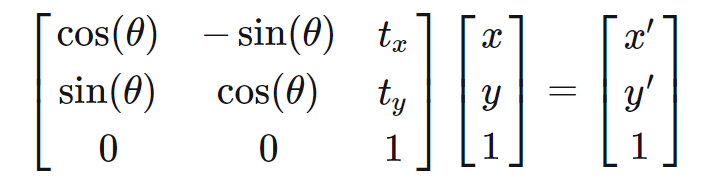
M就是一个3*2的矩阵
图像金字塔
如果单纯使用模板匹配,时间复杂度将爆炸,但我们可以使用图像金字塔来进行优化
建立n层图像金字塔,对于每一层金字塔,将图像向下采样,每$2^n$行$2^n$列取一个像素。由此获得$\frac{1}{2^n}$倍的图像和模板。采样完后的图像可用高斯滤波器滤波(本项目没有)
从高层开始将该层模板对该层图像进行模板匹配,所有匹配度高于某一阈值的点都将用一个矩形框住,并记录下旋转角度变换范围。
下一层在上一层截取的区域和角度中进行模板匹配,依次类推逐渐获得一个比较小的匹配区域和角度范围。
对n-1层图像金字塔依次进行匹配后,在源图像中找到得到的区域,并在相应角度范围中进行最终的模板匹配,获得中心点的位置。
尺寸计算:
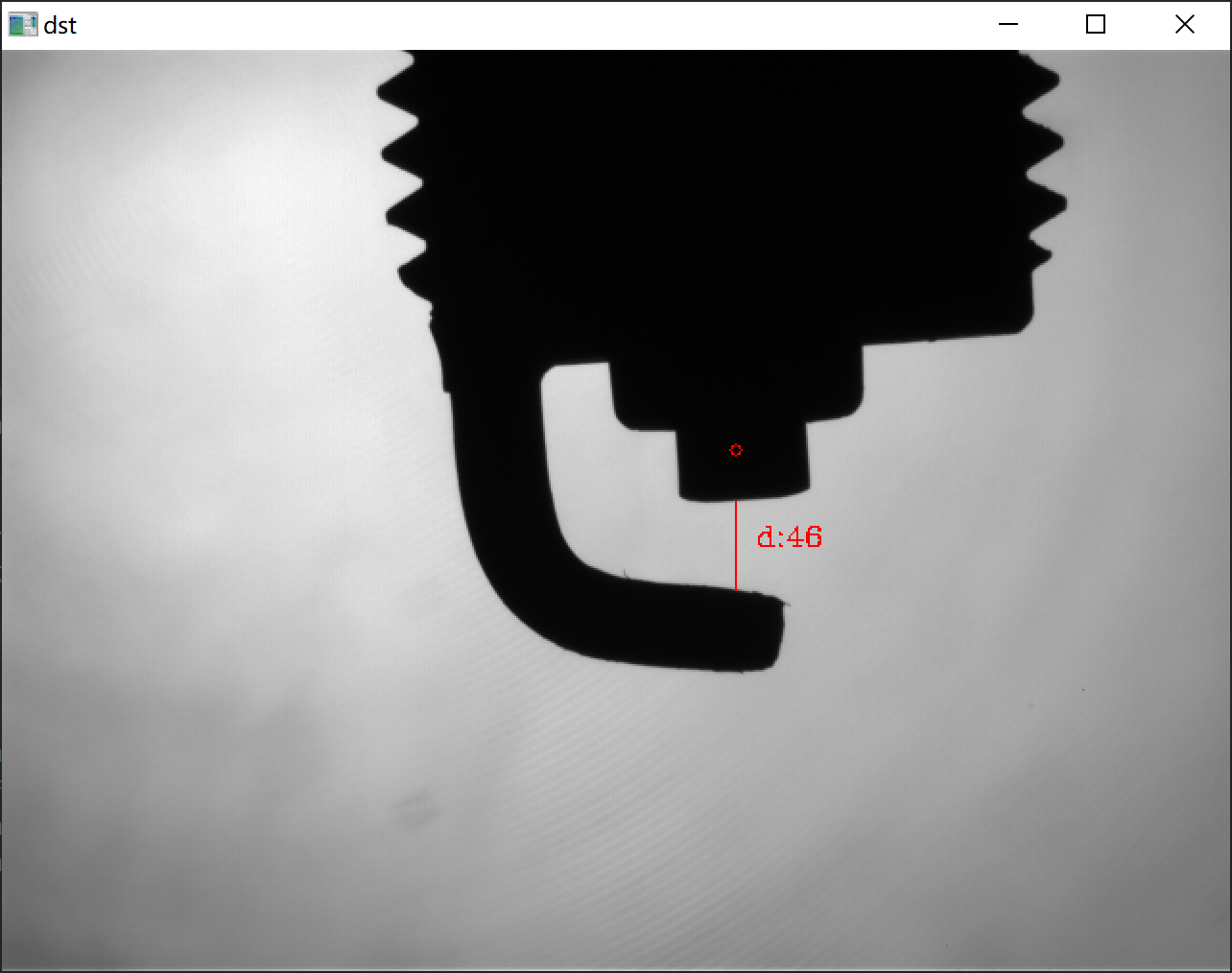
当找到匹配区域的中心点位置后,垂直向下寻找火花塞间隙。将图片变换成灰度图之后,就可以发现向下直线上的两处灰度值突变的点便是间隙边缘上的点,计算两点间距离就是火花塞间隙的开度。
绘制输出
测量处相关函数之后就可以在图片上绘制测量区域,并且显示开度的数值
代码实现
1 |
|
实验结果


结论
在这个项目中我们学到了如何基于opencv库中的模板匹配实现待识别器件的定位,以及根据位置信息测量所需的参数。该技术可用于简单环境下的零件尺寸测量。由于需要旋转角度匹配时可以匹配旋转的图片,所以速度非常的慢。但使用图像金字塔进行优化后,速度提升非常之大。